
Az egyetem korábban értékes tapasztalatokat szerzett az űrbéli robotkommunikációs telematika terén, s az ezt hasznosító munka eredményeként a Ford több olyan fejlesztést is szabadalmaztatott, amelyek a jövő kommunikáló autóiban is megjelennek majd.
“Az űripar és az autóipar közösen vállalta fel a megbízható, vezeték nélküli kommunikációs hálózat létrehozásával járó kihívást,” mondta Oleg Gusikhin, a Ford Kutatási és Fejlett Tervezési osztályának részlegvezetője. “Az első eredmények igen biztatóak: sikerült kidolgoznunk egy, a mostaninál megbízhatóbb kommunikációs technológiát, amit a jövőben a kommunikáló járművekben alkalmazhatunk.”
A hároméves közös projekt elsődleges célja egy megbízható kommunikációs technológia kifejlesztése volt, amely az autóvezetőket és szolgáltatókat összekapcsolja a felhőben tárolt információkkal és szolgáltatásokkal. A Ford elsősorban azt szerette volna megoldani, hogy a járművek és a felhő közti adatátvitel akkor is zökkenőmentes legyen, amikor a vezeték nélküli kommunikációs hálózat túlterhelt, vagy nem csatlakozik megfelelően.
Hogyan működik a prototípus?
A munka során mozgó járművekből gyűjtöttek és továbbítottak adatokat, amelyek a felhőhöz kapcsolódás több fajtáját képviselték: mobiltelefonos kapcsolatokat, Wi-Fi adatátvitelt létesítettek, illetve más járművekkel és infrastruktúrákkal kommunikáltak. A csapat egy intelligens ‘kapcsolatkezelőt’ hozott létre; ez a szoftver különleges algoritmusok segítségével választja ki a legalkalmasabb megoldást az elérhető kapcsolódási lehetőségek közül a felhő felé történő adattovábbításra, miközben az összes járműben mérhető a kommunikációs csatornák minősége, és továbbíthatók adatok.
A kutatók kidolgoztak egy kis léptékű kapcsolódás-lefedettségi térképet, ami ábrázolja a terep jellegzetességeit, miközben bekalkulálja a rögzített és mobil (vezeték nélküli) hozzáférési pontokkal kapcsolatos adatokat, az elérhető kommunikációs csatornák átviteli minőségét, sőt az útviszonyokat is.
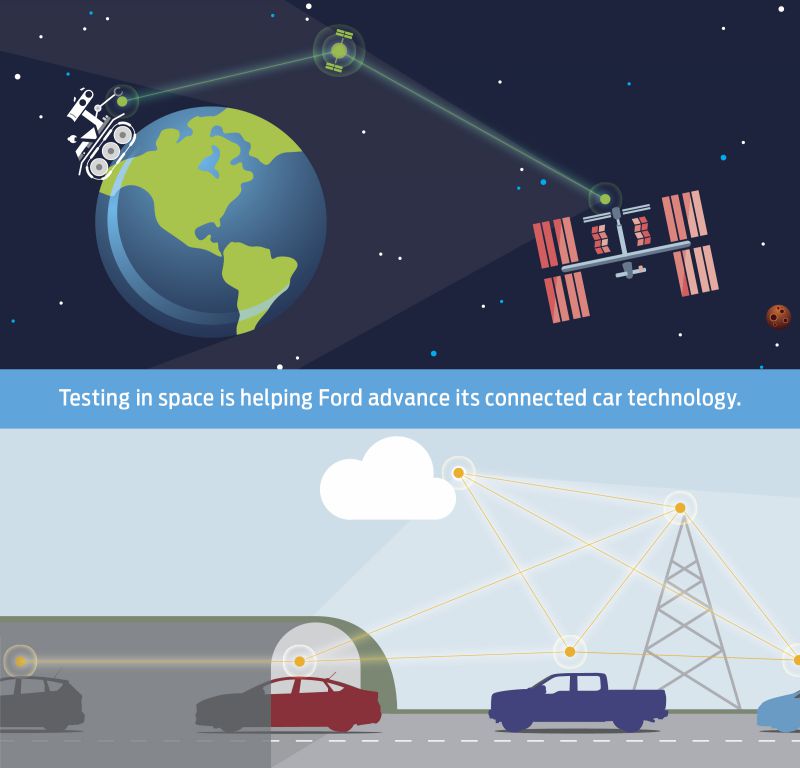
A csapat kiemelten összpontosított arra, hogyan lehet megosztani a vészhelyzetekkel kapcsolatos létfontosságú információkat az olyan területen haladó autósokkal, ahol gyenge a vezeték nélküli kapcsolat. E forgatókönyv szerint egy alagútba behajtó autó lefagyott útfelületre fut kerül, és figyelmeztető jelzést kell továbbítania a mögötte haladó többi jármű felé. Nincs mobiltelefonos lefedettség, és a Wi-Fi sem használható, mert nincs hot-spot, de egy másik, az alagutat éppen elhagyó autóban van jármű-jármű közti és mobiltelefonos kapcsolat is.
Az intelligens kapcsolatkezelő kiválasztja a másik autó jármű-jármű közti csatornáját, hogy azon továbbítsa az első autóból származó információkat a felhőbe, ahonnan a veszélyre figyelmeztető jelzés továbbjuthat a többi autóvezetőhöz. Ha nincs más autó a közelben, akkor a kapcsolatkezelő elhalasztja az üzenet elküldését, amíg az első autó elhagyja az alagutat, és elérhetővé válik a mobiltelefonos hálózat.
A nem vészhelyzeti szituációkban a kapcsolatkezelő a lefedettségi térképen ellenőrzi, hol található a legelőnyösebb pont a szolgáltatás igénybe vételére. Ha a jármű elszigetelt területen halad, és szoftverfrissítést küld ki, akkor ennek kézbesítése akkor történik meg, ha jobb lesz a kapcsolat.
Mi jön ezután?
Mivel a jövőben egyszerre több száz járműből érkezik majd be információ, egy univerzális kapcsolódási térkép mutatja az aktuális adatokat. Ez azt jelenti, hogy bármely helyzetben – akár haladás, akár parkolás közben – a legstabilabb mobiltelefonos, beépített modemes, Wi-Fi, stb. kapcsolattal rendelkező jármű lehet majd a megbízható kapcsolódás alapjául szolgáló pont az információs szolgáltatások felé, hozzájárulva ezzel az egész autós közösség jobb kiszolgálásához.
Vladimir Zaborovsky, a Szentpétervári Állami Műszaki Egyetem telematikai tanszékvezetője elégedett a projekt eredményeivel. “A kifejlesztett megoldások megbízhatósága és adaptálhatósága magas szintű, így széles körben alkalmazhatók – akár a közlekedési logisztika, akár az űrbéli robotika területén,” – mondta. “Örömmel várjuk, hogy a Fordnál dolgozó kollégáinkkal újabb közös munkába kezdjünk.”
2015 végére zárul le a projekt, amelynek eredményeit a Ford a gyártási programjaiban is felhasználja majd a jármű-jármű közti kommunikáció, a segélyhívások továbbítása és a rádióhullámos szoftverfrissítések területén.
Űrbéli alkalmazások
A Szentpétervári Állami Műszaki Egyetem telematikai kutatói sikeres kísérleteket végeztek az űrben ugyanazon többcsatornás kapcsolódási alapelvek alkalmazásával, melyeken a Forddal közös kutatási projekt is alapult. A Nemzetközi Űrállomáson dolgozó űrhajósok erős háttérzajban, a jeltovábbítási időeltolódás és a műszaki meghibásodások ellenére sikeresen irányítottak joystick segítségével egy földi robotot.
A csapat következő célja, hogy tudományos felszereléseket és műholdakat összeszerelő robotok teljes csoportja távvezérelhető legyen ezzel a technológiával.




























